-

佛山市捷德宝科技有限公司
主营:驱动器维修,变频器维修,直流调速器维修

佛山市捷德宝科技有限公司
主营:驱动器维修,变频器维修,直流调速器维修 16
16

西门子伺服电机七大故障维修内容总结
SIEMENS伺服驱动器故障检测修理
西门子伺服电机维修后的安装细节维修完成后重新安装伺服电动机的注意点:①伺服电机的安装方向,应保证在结构上易于电刷安装、检查和更换的方向。②带有热管的伺服电机(有风扇电动机),安装方向要便于检查和清扫冷却器。
③由于伺服电机的防水结构不是很严密,若切削液、润滑油等渗入伺服电机内部,会引起绝缘强度降低、绕组短路、换向不良等故障,从而损坏换向器表面,使电刷的磨损加快。因此,应该注意电动机的插头方向,避免切削液的进入。
④当伺服电机安装在齿轮箱上时,加注润滑油时,齿轮箱的润滑油油面高度必须低于伺服的输出轴,防止润滑油渗入电动机内部。⑤固定伺服电动机联轴器、齿轮、同步带等连接件时,在任何情况下,作用在电动机上的力不能**过电动机容许的径向、轴向负载。
⑥必须按照说明书的规定,进行正确连线(见机床连接图)。错误的连线可能引起电动机失控或异常的震荡,也可能引起电机机床的损坏。完成接线后,通电前要测量电源线与电动机壳体间的绝缘,测量应该用500V兆欧表或万用表进行,并用万用表检查线和电机壳体的绝缘,但决不能用兆欧表测量脉冲编码器线的绝缘。
SIEMENS伺服电机维修需要具备哪些能力。发电机维修是一种非常复杂的,对于机器人维修的技能要求比较高。近几年来,随着工业机器人的大力推广,伺服电机的使用范围越来越广泛,各品牌的机器人电机都有所不同,针对西门子伺服电机维修这种性的需求也越来越迫切。
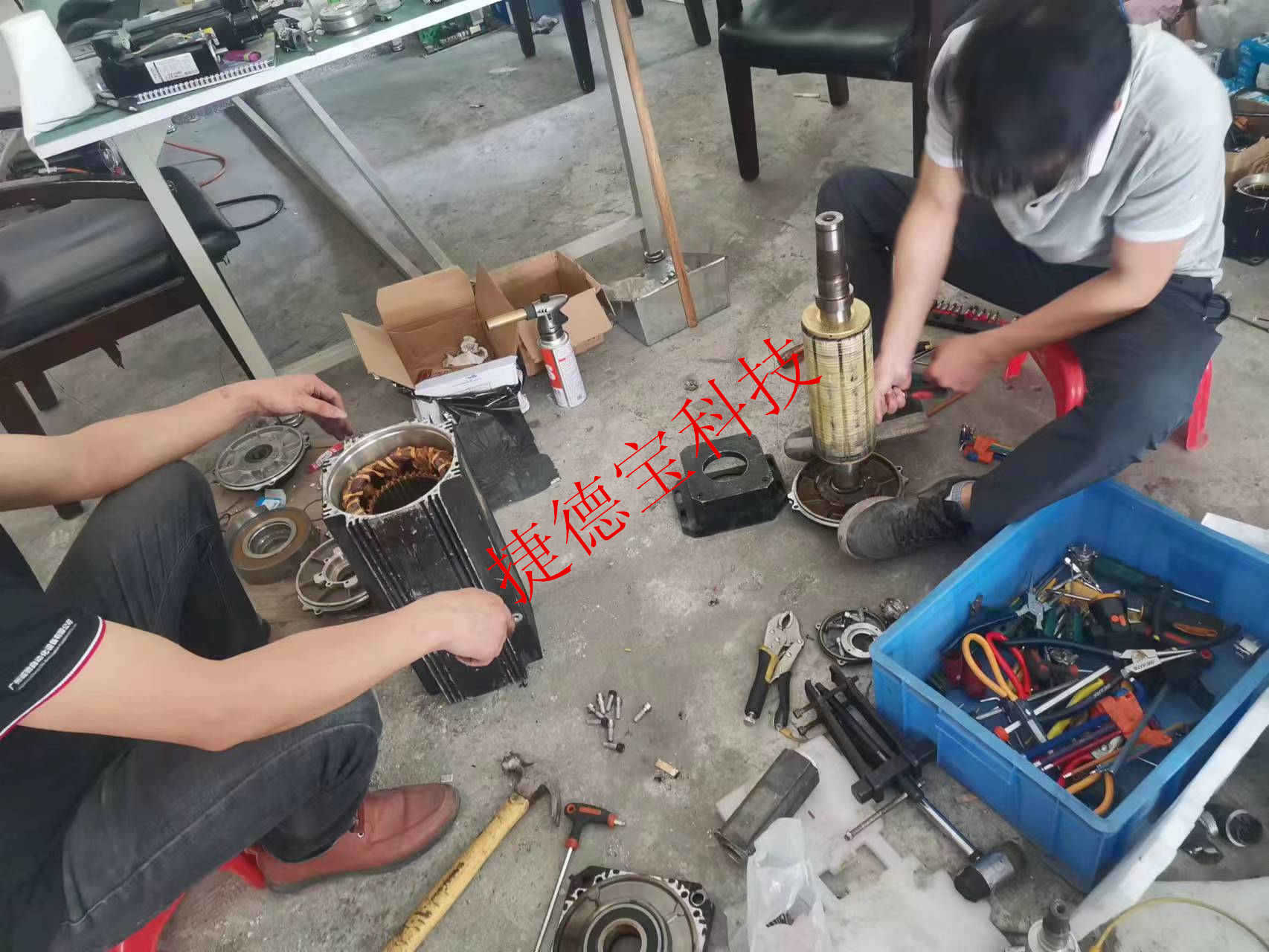
那么西门子伺服电机维修需要具备哪些能力呢。SIEMENS伺服电机维修分为两大部分:机械部分维修和电气部分维修。机械部分主要是针对伺服电机轴承损坏程度进行选择性的更换。相对于普通电机的维修,只是轴承上特殊了。因为大部分伺服电机都是同步电机,转子上带磁较,用普通材料不能够解决问题,所以材料非常关键,同时维修过程中对位要求也比普通电机更高。

电气部分维修,其主要是为其中的绕线、磁铁和编码器的维修,发那科伺服电机维修需要具备过硬的知识作为基础,像应对维修中的充磁问题以及编码器问题等等,都需要涉及到知识的。针对伺服电机的充磁,充磁需要有一定的含量,通常为机外充磁与拆开充磁,前者适合一些定子磁场的充磁;而拆开充磁需要有,除了需获知原有马达的磁强,还需要了解分布情况,同时形状要有保证。
SIEMENS伺服电机维修中对编码器进行更换与维修更是考验含量的地方,因为一般进口的伺服格式,有很大的不同,另外早期增量型产品可以互相配换,但新一代产品已经形成各自不同的内部标准,不同厂家具备不同的标准模式,加上脉冲密度过大,另外编码器的对位有不同的算法,使各个品牌缺少了共用性,造成维修的难度加大。
为了应对伺服电机维修存在负载测试的难题,维修工程师们对于试机也是需要掌握的,试机是非常重要的要点,通常小作坊较难保证修复的伺服电机试验过再出厂,基本上是感觉大概修复了,缺少相应的负载测试平台,所以伺服电机维修也需要掌握试机这一技能。
采用SIEMENS伺服驱动器维修—电动机互馈对拖的测试平台这种测试系统由四部分组成,分别是三相PWM整流器、被测伺服驱动器—电动机系统、负载伺服驱动器—电动机系统及机,其中两台电动机通过联轴器互相连接。被测电动机工作于电动状态,负载电动机工作于发电状态。
被测伺服驱动器—电动机系统工作于速度闭环状态,用来控制整个测试平台的转速,负载伺服驱动器—电动机系统工作于转矩闭环状态,通过控制负载电动机的电流来改变负载电动机的转矩大小,模拟被测电机的负载变化,这样互馈对拖测试平台可以实现速度和转矩的灵活调节,完成各种试验功能测试。
用于整个系统的运行,根据试验要求向两台伺服驱动器发出控制指令,同时接收它们的运行数据,并对数据进行保存、分析与显示。对于这种测试系统,采用高性能的矢量控制方式对被测电动机和负载设备分别进行速度和转矩控制,即可模拟各种负载情况下伺服驱动器的动、静态性能,完成对伺服驱动器的而准确的测试。
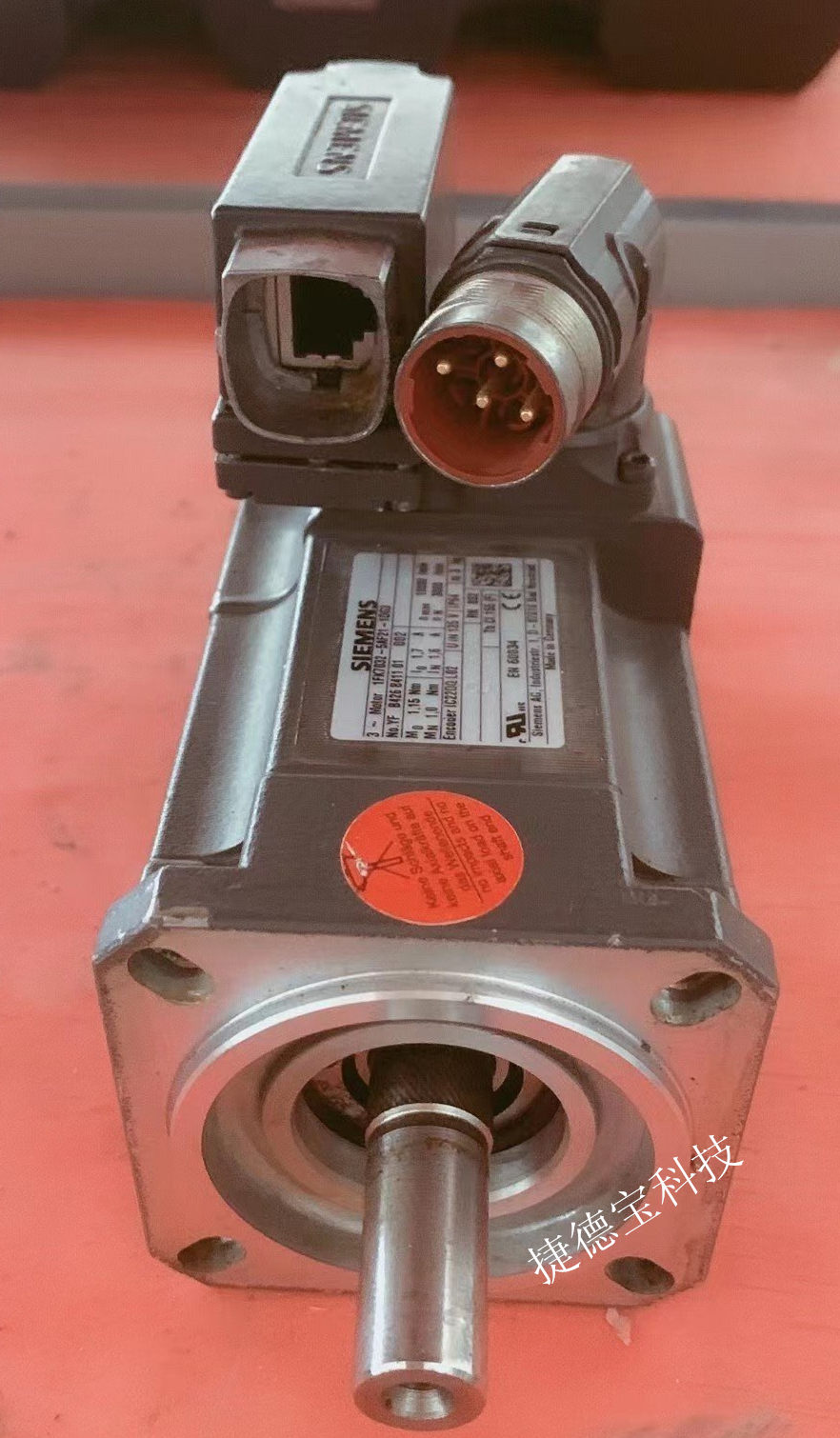
为什么伺服电机维修不同于普通电机维修机电维修行业通常把三相异步电机、单相电机、直流有刷、无刷电机统称为普通电机;把永磁同步电机,主轴电机,带速度反馈的高速电机称为伺服电机。(步进除外)业余简单识别的办法就是看电机除了UVW动力插头外,是否多出一个插头,通常在电机尾部,插针4根到20根不等。

F01061 CU:内部错误 (应用未知)
F01063 CU:内部错误 (PDM)
F01072 从备份文件中修复存储卡
F01068 CU:数据存储器溢出
F01105 (A)F01000 内部软件错误
F01001 浮点例外
F01002 内部软件错误
F01003 访问存储器时出现应答延迟
N01004 (F, A) 内部软件错误
F01005 下载 DRIVE-CLiQ 组件的固件失败
F01010 驱动类型不明
F01011 (N) 下载中断
F01015 内部软件错误
F01018 启动多次中断
F01023 内部软件**时
F01030 控制权下的号出错
F01031 “ 远程模式关 ” 下的号出错
F01033 单位转换:参考参数无效

F01034 单位转换:参考值更改后参数值计算失败
F01036 (A) ACX:缺少参数备份文件
F01038 (A) ACX:载入参数备份文件失败
F01039 (A) ACX:写入参数备份文件失败
F01040 需要备份参数并重新上电
F01041 需要备份参数
F01042 下载项目时的参数出错
F01043 在项目下载时出现严错误
F01044 CU:描述数据出错
F01050 存储卡和设备不兼容
F01054 CU:**出系统极限
F01055 CU:内部错误 (应用和端口的 SYNO 不相同)
F01056 CU:内部错误 (参数组时钟周期已经分配,但有偏差)
F01057 CU:内部错误 (从站的 DRIVE-CLiQ 类型不同)
F01058 CU:内部错误 (拓扑结构中没有从站)
F01059 CU:内部错误 (端口不存在)
F01060 CU:内部错误 (参数组不存在)
CU:存储器容量不足

F01106 CU:存储器容量不足
F01107 CU: 保存到存储卡失败
F01110 CU:一个控制单元上不止一个 SINAMICS G
F01111 CU:不允许驱动设备混合运行