-

佛山市捷德宝科技有限公司
主营:驱动器维修,变频器维修,直流调速器维修

佛山市捷德宝科技有限公司
主营:驱动器维修,变频器维修,直流调速器维修 16
16

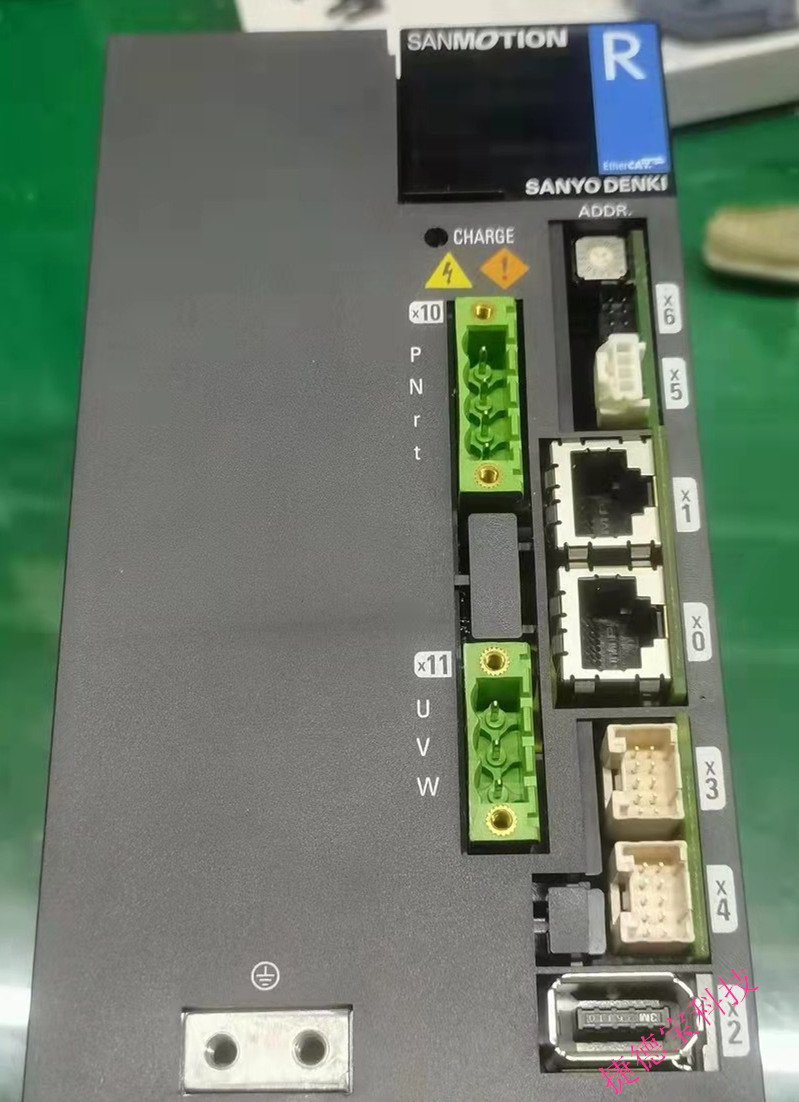
三洋伺服驱动器故障代码浏览表、三洋伺服放大器故障代码维修说明、
三洋(SANYO)伺服驱动器常见故障维修:
A0.A1.A2.A3.A4.A5.A6.A9.AA.AB.AC.AE.AF.AL21.AL22.
AL23.AL24.AL25.AL26.AL41.AL42.AL43.AL45.AL46.AL51.
AL52.AL53.AL54.AL56.AL61.AL62.AL63.AL71.AL72.AL73.
AL81.AL83.AL84.AL85.AL87.AL81.E3.E4.E8.

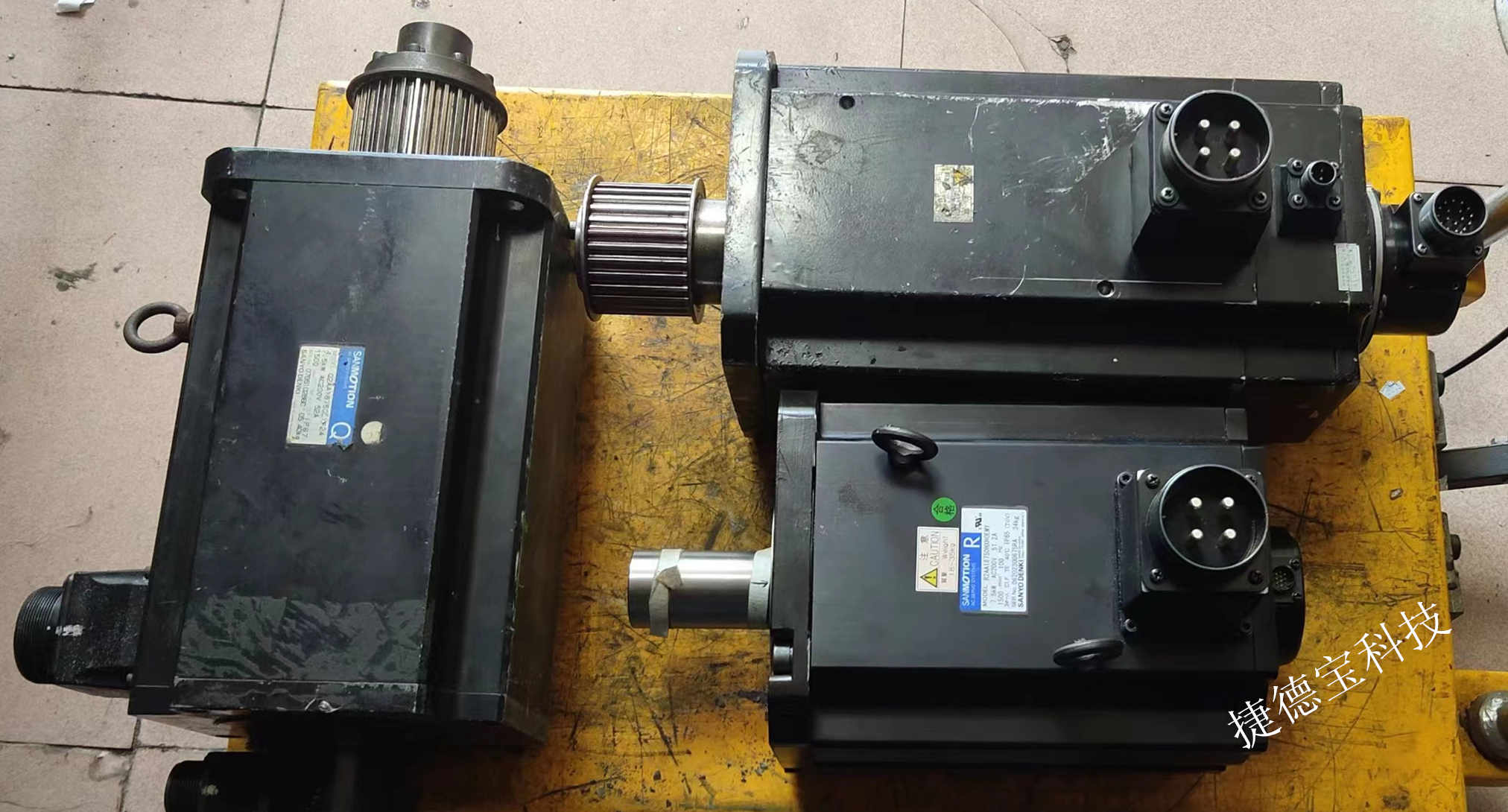
2)拆机检查:发现逆变输出模块炸裂,测量输出U、V、W端子已短路;发现10R40W电容充电电阻烧断。原因为逆变模块短路后其浪涌冲击电流将其烧断。查出整流回路尖波电
路的二极管和串联电阻同事损坏,10R5W电阻已开路,二极管短路。
3)分析原因:限流电阻的损坏是浪涌电流冲击所致;但尖峰电压电路的电阻和二极管同时损坏,则说明直流回路中出现了波动异常的冲击电压,电压异常的冲击,使其损坏,
是否由于逆变电压波动,络呢。逆变模块的损坏,可能是由于电动机时有堵转现象或由于元器件老化,电网电压冲击等原因。
4)修复:将损坏元器件拆除,并换新的,观察4只680UF400V电容外面上无异常,粗测滤波电容器无短路,也可“容量”----有充、放电现象;将损坏模块拆除,将其他损坏元
器件更换新品,送电后显示,说明电源及控制部分基本正常,测开关电源各路输出都正常。
1、速度比例增益设定速度调节器的比例增益;设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型 和负载值情况确定。一般情况下,负载惯量越大,设
定值越大;在系统不产生振荡的条件下,尽量设定较大的值。
2、位置前馈增益设定位置环的前馈增益;设定值越大时,表示在任何的指令脉冲下,位置滞后量越小;位置环的前馈增益大,控制系统的高速响应特性,但会使系统的位置不
,*产生振荡;不需要很高的响应特性时,本参数通常设为0表示范围:0~。
3、位置比例增益设定位置环调节器的比例增益;设置值越大,增益越高,刚度越大,相同指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或调;参数数值由
具体的伺服系统型 和负载情况确定。4、速度反馈滤波因子设定速度反馈低通滤波器特性;数值越大,截止越低,电机产生的噪音越小。